Description#
This command moves autochanger trucks to an absolute position given as argument.
Synopsis#
moveToAbsoluteTargetPosition <new_trucks_position>
where <new_trucks_position> is the position of the trucks we want to move to.
This command has to be sent to component autochangerTrucks.
Info
The value of <new_trucks_position> must be between minActualPositionValue and maxActualPositionValue which are configurable parameters for autochangerTrucks.
Example#
If we want to move autochanger to position 994000:
moveToAbsoluteTargetPosition 994000
Note
The velocity, acceleration and deceleration used are not changed by command moveToAbsoluteTargetPosition. Their values are those of trucks controllers parameters : ProfileVelocity, ProfileAcceleration, ProfileDeceleration.
Conditions to execute moveToAbsoluteTargetPosition#
- autochanger trucks controllers must not be in fault.
- the conditions to move trucks are those to guarantee filter security, so if there is no filter on trucks, trucks car be moved safely.
- if a filter is in the trucks :
ONLINEclamps must be opened- if trucks are at
HANDOFFand autochanger latches are closed, carousel or loader must not hold the filter too. - if trucks are at
STANDBY, filter must be hold by carousel or by autochanger. - if trucks are not at
STANDBY, carousel socket atSTANDBYmust be empty otherwise tehre is a risk of collision.
Local Protection System of autochanger trucks motion#
- Signals lpmLinearRail1Status and lpmLinearRail2Status must be on.
lpmLinearRail1Status and lpmLinearRail2Status can be checked on ccs-console on Autochanger General View
How#
There are 2 controllers to move autochanger trucks :
linearRailMasterControllerfor truckXplus.linearRailSlaveControllerfor truckXminus.
To be moved together, linearRailMasterController has to be in mode PROFILE_POSITION and linearRailSlaveController in mode MASTER_ENCODER.
The command moveToAbsoluteTargetPosition does :
- check if conditions of trucks motion are respected.
- check that
linearRailMasterControlleris in modePROFILE_POSITIONandlinearRailSlaveControlleris in modeMASTER_ENCODER. - enable
linearRailMasterControllerandlinearRailSlaveController - release brakes1.
- send command
writeTargetPositionto linearRailMasterController. - when the motion is completed, execute command :
activateBrakesAndDisable1
The java code to start action MOVE_TO_ABSOLUTE_POSITION :
checkControllersMode();
this.enableControllersAndReleaseBrake();
linearRailMasterController.writeTargetPosition(absoluteTargetPosition);
linearRailMasterController.writeControlWord(0x3F);
Configurables Parameters for autochanger trucks motion#
There parameters below are configurable parameters for component autochangerTrucks :
minActualPositionValue: minimal position for AC trucksmaxActualPositionValue: maximal position for AC truckstimeoutForTrucksMotion: maximum of time for a trucks motion
Troubleshooting#
During execution of the command, the motion can be checked on ccs-console, on Autochanger Trucks View.
{kind=link}
If trucks motion doesn't start#
When the motion can't be started, an error message is displayed on the ccs-console if the command was launched from the ccs-console.
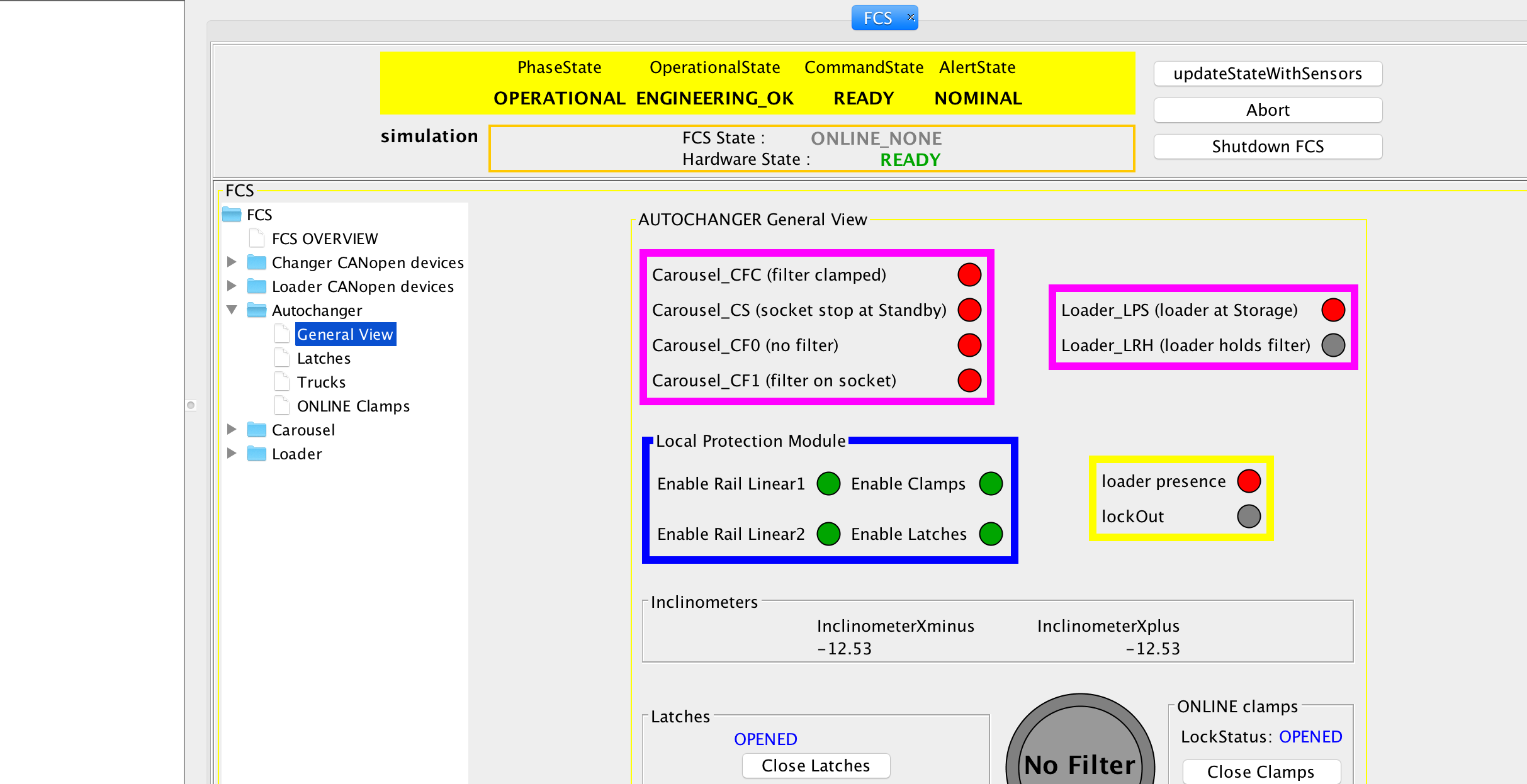
Check Local Protection System#
On Autochanger General View, Enable Rail Linear1 and Enable Rail Linear2 must be green :
Check initial conditions#
If trucks motion stopped before the target position is reached#
If an ALARM is raised during trucks motion#
An ALARM can be raised during trucks motion by the autochanger trucks controllers if they detect an error.
Note
The autochanger trucks controller are linearRailMasterController and linearRailSlaveController.
Usualy when the trucks controller encounter an error, it stops the motion.
The actions for recovery are :
-
solve the issue regarding the message
-
restart the motion in sending the command again.